焊装线机器人焊钳型号
机器人焊钳的耗能效率相对较高,主要原因在于其采用了先进的电子控制技术和高效的电机驱动系统。与传统的手工焊接相比,机器人焊钳可以实现高速、高精度的焊接操作,减少了焊接时间和能源消耗。此外,机器人焊钳还可以根据焊接工件的形状和材料特性进行智能化的优化,进一步提高了焊接效率和能源利用率。另外,机器人焊钳还具有自动化程度高、稳定性好、操作精度高等优点,可以有效地降低人工操作的误差和劳动强度,提高了生产效率和产品质量。虽然机器人焊钳的投资成本相对较高,但其长期的节能效益和生产效率提升,可以为企业带来可观的经济效益和社会效益。因此,机器人焊钳在现代制造业中得到了广泛的应用和推广。机器人焊钳的应用可以促进制造业的转型升级和智能化发展。焊装线机器人焊钳型号

机器人焊钳在焊接过程中保持稳定需要考虑以下几个方面:1.机器人的运动控制:机器人需要具备精确的运动控制能力,以确保焊钳在焊接过程中的稳定性。机器人的运动控制系统需要具备高精度的位置控制和速度控制能力,以确保焊钳在焊接过程中的稳定性。2.焊钳的结构设计:焊钳的结构设计需要考虑到焊接工件的形状和大小,以确保焊钳能够牢固地夹住工件,并且在焊接过程中不会发生松动或者抖动。焊钳的结构设计还需要考虑到焊接过程中的热变形和热膨胀,以确保焊钳在焊接过程中的稳定性。3.焊接参数的控制:焊接参数的控制对于焊接过程的稳定性也非常重要。焊接参数包括焊接电流、焊接电压、焊接速度等,这些参数需要根据焊接工件的材料和形状进行调整,以确保焊接过程的稳定性。4.环境因素的控制:焊接过程中的环境因素也会对焊接过程的稳定性产生影响。例如,焊接过程中的风力、震动、温度等因素都需要进行控制,以确保焊接过程的稳定性。石家庄伺服机器人焊钳品牌排行机器人焊钳的使用能够提高企业的竞争力和市场占有率。
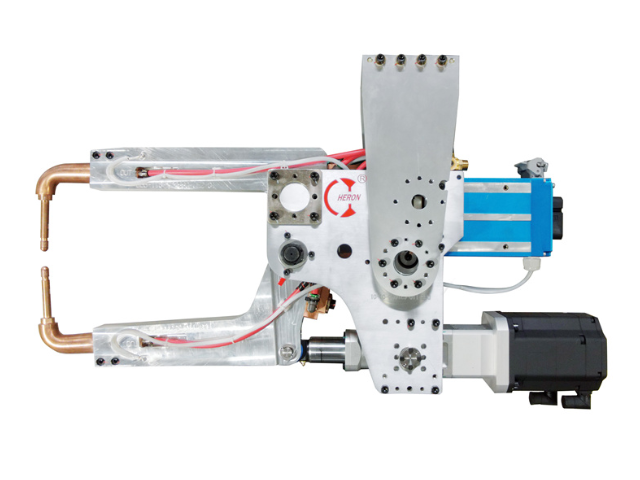
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。
随着机械制造行业焊接任务的加剧,焊接作业本来就存在劳动条件差,热辐射较大,是一个危险性较强的职业,机械制造中也有很多大型设备,这也加大了焊接的难度,焊接机器人是从事焊接工作的自动机械设备,解放了工人劳动强度,帮助机械制造领域提高自动化水平。实现复杂工件的轻松焊接。工程机械制造行业中会出现很多非标工件的焊接,传统焊接容易导致焊接质量不均匀,智能焊接机器人搭配焊接变位机进行多方位灵活焊接,焊接变位机会对焊接机器人的灵活度进行补偿,提高焊缝的焊接精度,只需要根据行走路径设置好编程,就可以实现轻松焊接。机器人焊钳采用先进的传感技术和控制系统,能够实现高精度的焊接操作。

机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定。一般来说,焊接参数包括焊接电流、电压、焊接速度、焊接时间、焊接角度等。首先,焊接电流和电压是影响焊接质量的关键参数,需要根据焊接材料的种类、厚度、焊接位置等因素来确定。一般来说,焊接电流和电压需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整。其次,焊接速度和焊接时间也是影响焊接质量的重要参数。焊接速度需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整,而焊接时间则需要根据焊接材料的厚度、焊接位置等因素来进行调整。除此之外,焊接角度也是影响焊接质量的重要因素。焊接角度需要根据焊接材料的形状、焊接位置等因素来进行调整,以确保焊接质量和焊接强度。总之,机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定,需要进行多次试验和调整,以确保焊接质量和焊接强度。机器人焊钳的操作界面友好,能够方便操作人员进行控制和监控。成都单机器人机器人焊钳电路图
机器人焊钳的使用可以提高工作安全性,减少人员受伤的风险。焊装线机器人焊钳型号
机器人焊钳的焊接质量可以通过以下几个方面进行评估和控制:1.焊接参数控制:机器人焊钳的焊接质量受到焊接参数的影响,如电流、电压、焊接速度等。通过对这些参数进行控制,可以保证焊接质量的稳定性和一致性。2.焊接过程监控:机器人焊钳的焊接过程可以通过传感器进行监控,如温度传感器、力传感器等。通过实时监控焊接过程,可以及时发现焊接质量问题并进行调整。3.焊接缺陷检测:机器人焊钳的焊接质量可以通过焊接缺陷检测进行评估,如X射线检测、超声波检测等。通过对焊接缺陷进行检测,可以及时发现焊接质量问题并进行修复。4.焊接工艺优化:机器人焊钳的焊接质量可以通过焊接工艺优化进行控制,如选择合适的焊接材料、优化焊接顺序等。通过优化焊接工艺,可以提高焊接质量和效率。综上所述,机器人焊钳的焊接质量可以通过多种方式进行评估和控制,从而保证焊接质量的稳定性和一致性。焊装线机器人焊钳型号
上一篇: 河北伺服机器人焊钳工厂
下一篇: 广东电热水器支架储能焊机电路图