DSM疲劳驾驶主动安全预警系统应用场景
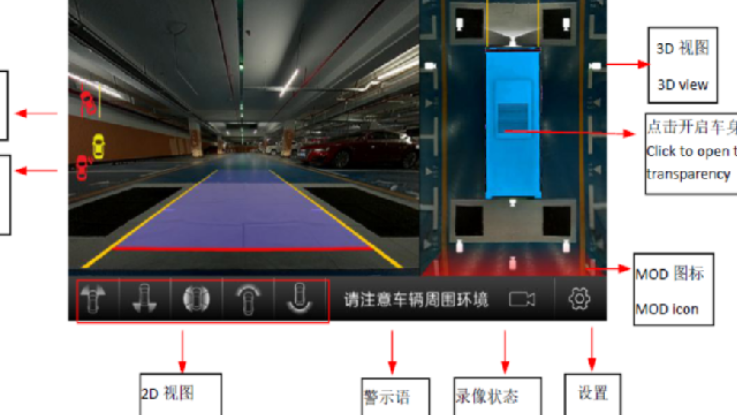
在工矿领域,车侣主动安全预警设备可以起到关键的作用,帮助提高工作场所的安全性。以下是一些在工矿领域中常见的主动安全预警设备应用案例:.防碰撞系统:工矿场所通常存在大型机械设备和运输车辆,防碰撞系统可以通过传感器监测车辆和行人的位置,发出警报或自动减速避免碰撞。这有助于减少意外事故,并保护工人的生命安全。盲点监测系统:大型机械设备和车辆在工矿场所中可能存在盲点,盲点监测系统可以通过传感器和摄像头监测盲点区域,当有人员或障碍物位于盲点时,发出警报,提醒操作人员注意,防止事故发生。环境监测系统:工矿场所可能存在有害气体、高温等危险环境,环境监测系统可以实时监测环境参数,如气体浓度、温度等,当超过安全范围时,发出警报,保护工人的健康和安全。视觉辅助系统:工矿场所可能存在复杂的工作环境和视线受限的情况,视觉辅助系统,如360全景影像系统、倒车摄像头等,可以提供实时的周围环境影像,帮助操作人员更好地感知周围状况,避免碰撞和其他危险。以上是一些常见案例,工矿领域的应用还会根据具体的工作场所和设备进行定制。重要的是根据实际需求和风险评估,选择适合的主动安全预警设备,提高工矿场所的安全性和工作效率。 主动安全预警系统未来发展趋势怎么样?DSM疲劳驾驶主动安全预警系统应用场景
主动安全预警系统
车侣车载主动安全预警系统在不同工程设备上的应用效果可能会有所差异。以下是一些常见的工程设备应用和对应的效果:物料运输车辆:对于物料运输车辆,主动安全预警系统可以提供前向碰撞预警功能,及时发出警报并采取措施避免撞击行人、其他车辆或障碍物。这有助于减少事故风险和保护运输车辆和周围人员的安全。建筑设备(如吊塔、起重机):主动安全预警系统在建筑设备中的应用可以提供防碰撞和盲点监测功能。通过监测设备周围的障碍物,系统可以发出警报,避免设备与建筑物、人员或其他设备发生碰撞。农业机械(如拖拉机、收割机):对于农业机械,主动安全预警系统可以提供车道偏离警示和障碍物检测功能。这有助于驾驶员及时纠正车辆位置,避免偏离车道并避免与障碍物发生碰撞,提高农业作业的安全性和效率。需要注意的是,不同的工程设备和应用场景可能需要不同类型的主动安全预警系统,并且系统的效果也会受到诸如传感器准确性和驾驶员的操作等因素的影响。因此,在选择和使用主动安全预警系统时,建议根据具体场景和需求进行评估,并遵循使用说明和安全操作规定。 东北工程车智能主动安全预警系统怎么查看车侣主动安全预警系统后台管理数据?
目前主流的主动安全预警系统的硬件组件包括以下部分:摄像机:用于采集前方道路和车辆行驶信息,包括车辆、行人、交通信号等信息。摄像机应具备高清、宽动态、低照度等特性,适应不同的光照条件和行驶速度。视频分析处理器:用于对摄像机采集的视频数据进行实时分析处理,检测和识别各种交通场景和目标,进行预警和决策。视频分析处理器应具备高效、低功耗、低延迟等特性,适应不同的处理任务和系统资源。声光报警装置:用于根据预警信号向驾驶员发出声音和灯光报警,提醒驾驶员注意安全,及时采取避让或减速等措施。声光报警装置应具备高可靠、高亮度、防炫目等特性,保证驾驶员的视觉和听觉安全。太阳能电源系统:用于为主动安全预警系统提供稳定、可靠的电源供应。太阳能电源系统应具备高效、长寿、稳定等特性,能够充分利用太阳能资源,保证系统的长时间稳定运行。其他硬件组件:根据具体应用场景和需求,主动安全预警系统可能还包括其他硬件组件,例如卫星定位模块、通信模块、传感器等。需要注意的是,不同的主动安全预警系统的硬件组件可能有所不同,具体应根据系统的设计要求和应用场景进行选择和配置。
主动安全预警系统在工矿领域车辆安装较少的原因可能有以下几个方面:成本因素:工矿领域使用的车辆通常是一些重型车辆,如矿用卡车、挖掘机等,这些车辆本身的制造成本就比较高。因此,在原有车辆上加装主动安全预警系统的成本也相对较高,导致很多企业不愿意在这方面进行投资。适用性问题:工矿领域中的车辆往往需要在复杂、恶劣的环境下工作,如崎岖不平的路面、泥泞的地面、高湿度、高温度等。这些环境因素对主动安全预警系统的性能和可靠性提出了更高的要求,需要进行专门的适应性和验证,增加了研发和应用的难度和成本。维护和保养问题:主动安全预警系统需要定期进行维护和保养,以确保其正常工作。主动安全预警系统的技术发展历史?
在车侣主动安全预警系统中,计算机算法起到了的作用:数据处理和分析:算法可以处理和解析从各种传感器和系统获取的大量数据,包括环境感知信息、车辆信息和驾驶员信息等。通过对这些数据的分析,算法能够判断车辆的行驶状态和风险程度,并触发相应的预警和干预措施。决策和干预:基于对数据的分析和解读,算法能够根据预设的规则和算法逻辑进行决策,并触发相应的预警和干预措施。例如,当系统检测到潜在的碰撞风险时,算法可以自动或半自动地采取制动、减速或避让等措施,以避免或减轻碰撞。优化和自适应:算法能够根据系统的运行状态和历史数据,自动调整自身的运行参数和策略,以优化系统的性能和适应性。例如,根据不同的道路环境和交通状况,算法可以自动调整预警和干预策略,以更好地保障车辆的安全。人机交互:算法能够根据驾驶员的行为和需求,提供相应的预警和干预措施。例如,当驾驶员打瞌睡或注意力不集中时,算法可以自动检测并提醒驾驶员,或者采取一定的干预措施,以保障驾驶员的安全。总之,计算机算法在主动安全预警系统中起到了数据处理、决策和干预、优化和自适应、人机交互等作用,为车辆的安全行驶提供了有效的保障。 车侣主动安全预警系统的晚上使用注意事项有哪些?广东主动安全预警系统应用场景
车侣主动安全预警系统中可以对接的协议有哪些?DSM疲劳驾驶主动安全预警系统应用场景
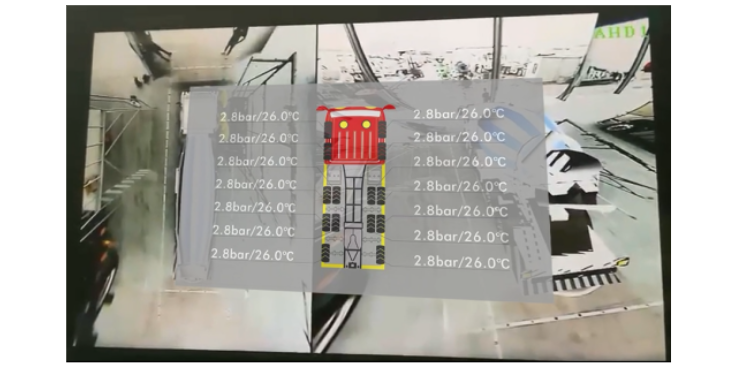
车侣主动安全预警系统中的超声波主要用于车辆泊车辅助和防撞系统。具体来说,超声波技术被用于检测车辆周围的物体和障碍物,提供车辆与这些物体之间的距离信息。在泊车过程中,超声波传感器安装在车辆的保险杠上,可以实时感知周围环境,为驾驶员提供关于距离、速度和方向的信息,以帮助驾驶员更安全、更有效地泊车。此外,超声波也被用于车辆的防撞系统。通过在车辆周围安装多个超声波传感器,可以构建一个360度的“虚拟感应圈”,实时感知周围的障碍物和运动物体,及时发出警告,甚至自动采取制动措施,以避免碰撞事故的发生。综上所述,超声波在主动安全预警系统中起到了关键的作用,特别是在车辆泊车和防撞系统中,为驾驶员提供了重要的安全保障。 DSM疲劳驾驶主动安全预警系统应用场景
上一篇: 云台主动安全预警系统原理
下一篇: 大湾区360全景影像主动安全预警系统